«Наша работа обеспечила полёт дрона Ingenuity на Марсе»!
Технологии, обеспечившие безотказную работу беспилотника Ingenuity, совершившего недавно полёт над Марсом, не были бы созданы без швейцарских идей и разработок.

Перевод с английского: Нина Шулякова.
Давиде Скарамуцца (Davide Scaramuzza), возглавляющий Рабочую группу по развитию и применению робототехники (Robotics and Perception GroupВнешняя ссылка) при Цюрихском университете, считает этот полёт «большим успехом» и говорит, что следующим шагом для марсианских дронов будет исследование регионов, скрывающих, возможно, следы былой жизни на Марсе. Кроме того, с их помощью можно было бы искать области, пригодные для поселения людей, которые, возможно, когда-нибудь отправятся на красную планету.
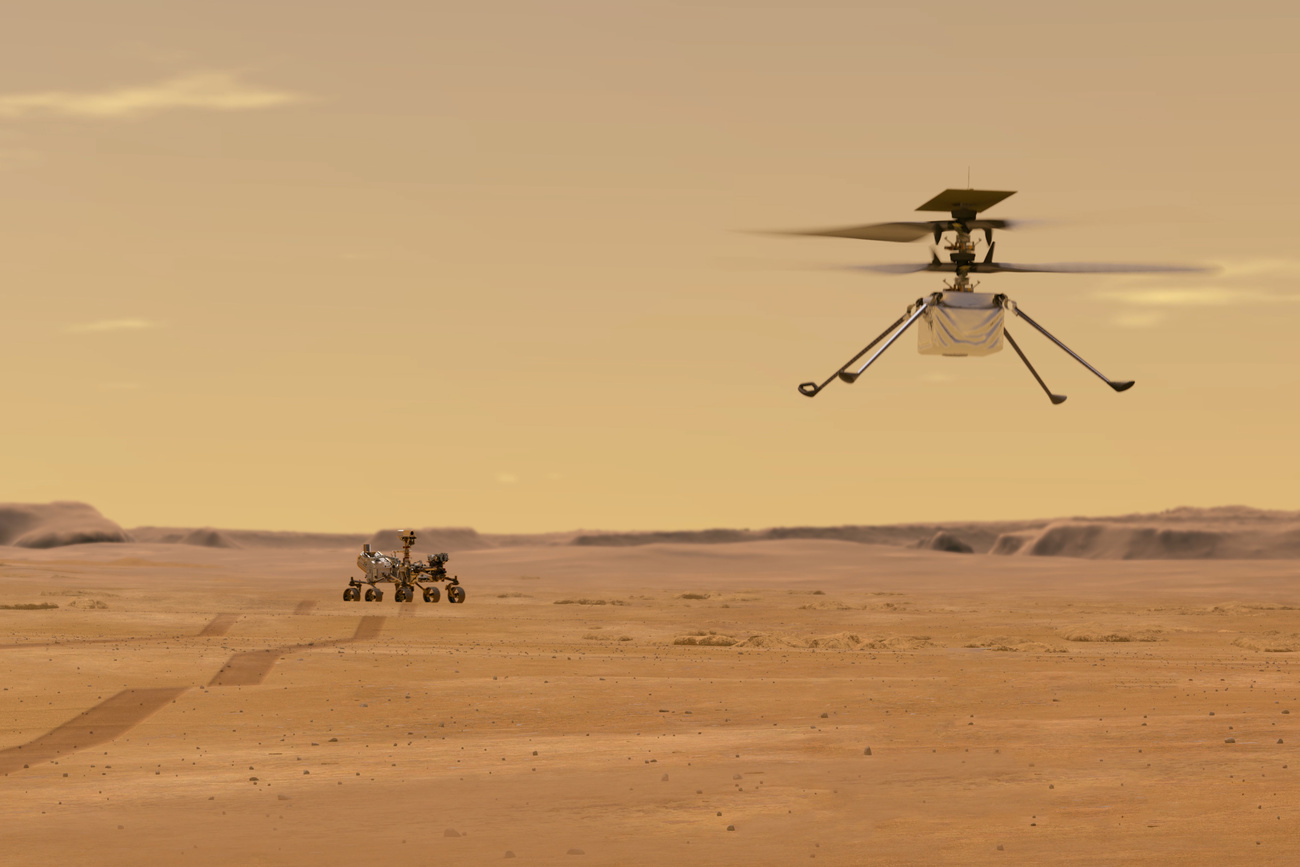
Еще недавно всё внимание мировой научной и не только общественности было приковано к удачной посадке марсохода Perseverance на поверхность Марса и к беспилотнику Ingenuity, который совершил первый в истории автономный радиоуправляемый полёт за пределами атмосферы Земли. Эта миссия стала гигантским шагом в сторону совершенствования технологий поиска признаков существования на иных планетах, в частности на Марсе, следов микробной жизни. Кроме того, дрон можно также использовать для исследования закрытых пространств, в которые марсоход пробраться будет неспособен.
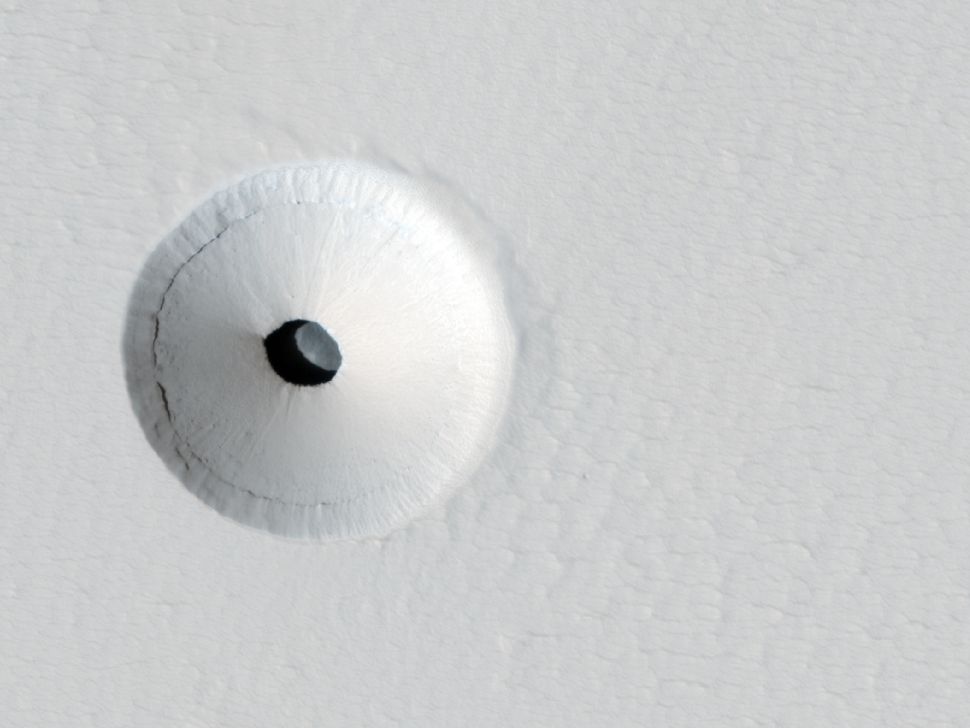
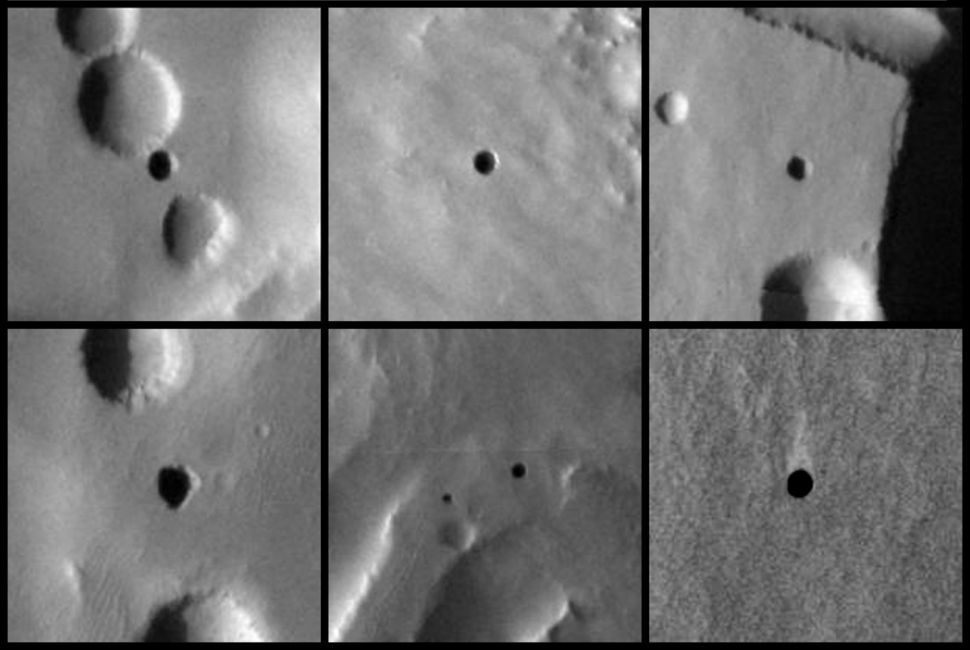
Речь идет о так называемых «лавовых трубках». Такие, как их еще называют, «лавовые туннели», то есть полости в лавовых потоках, вытянутые в виде коридоров, возникают при неравномерном остывании стекающей со склонов вулкана лавы. Причем тут Давиде Скарамуцца? А как раз он и его коллеги уже с 2009 года разрабатывают технологии, позволяющие автономным беспилотным летательным аппаратам ориентироваться в пространстве при помощи бортовых видеокамер, обходясь без поддержки системы GPS, которой, что понятно, на Марсе нет и пока не предвидится.

Показать больше
Швейцарские технологии исследуют Марс на борту Perseverance
Беспилотник Ingenuity использовал как раз разработки, возникшие в его лаборатории. С недавнего времени она плотно сотрудничает с НАСА в подготовке будущих миссий таких дронов на Марсе. Портал SWI swissinfo.ch расспросил Давиде Скарамуцца о том, что нам могут рассказать такие БПЛА о Марса и какую роль они сыграют в будущем в исследовании, например, марсианских «лавовых трубок».
SWI swissinfo.ch: Как прошёл полёт Ingenuity на Марсе? Что он означает с научной точки зрения?
Давиде Скарамуцца: Это огромный успех, демонстрация первого автономного полёта на другой планете. И это удивительно, потому что плотность атмосферы Марса составляет только 1% от плотности атмосферы Земли. Чтобы вы могли себе это представить и сравнить, скажу, что полёт по поверхности Марса эквивалентен полёту на высоте 30 километров над Землёй!
Уточню также, этот полёт был автономен только отчасти — сначала дрону рассчитывают маршрут, по которому он потом и отправляется в полет. Опять же, это просто удивительно, если учесть, что сейчас 99% коммерческих дронов все ещё используют для навигации систему GPS. Успех марсианского дрона доказывает, что технология автономной навигации на основе видеокамер, над которой я работаю, становится по-настоящему зрелой!
В чём конкретно заключается Ваша работа?
Основная цель работы моей лаборатории — научить автономные дроны летать лучше, чем летательные аппараты, управляемые пилотами-людьми. Я занимаюсь разработкой алгоритмов, позволяющих сделать их способными выполнять сложные задачи, вести, скажем, разведку и картографирование неизвестных районов для поддержки поисково-спасательных операций, а также действовать эффективнее, чем пилоты-люди.
Эти технологии уже сегодня используются, причем не только в поисково-спасательных целях, но и при осуществлении технического осмотра сложных объектов инфраструктуры и при доставке грузов, а в будущем они смогут играть важную роль и в рамках космических миссий, в том числе при полетах на другие планеты. Очень перспективной является цель научить дрон проникать в лавовые трубки, исследовать их и картографировать.
Не могли бы вы рассказать поподробнее о сотрудничестве Вашей лаборатории с НАСА?
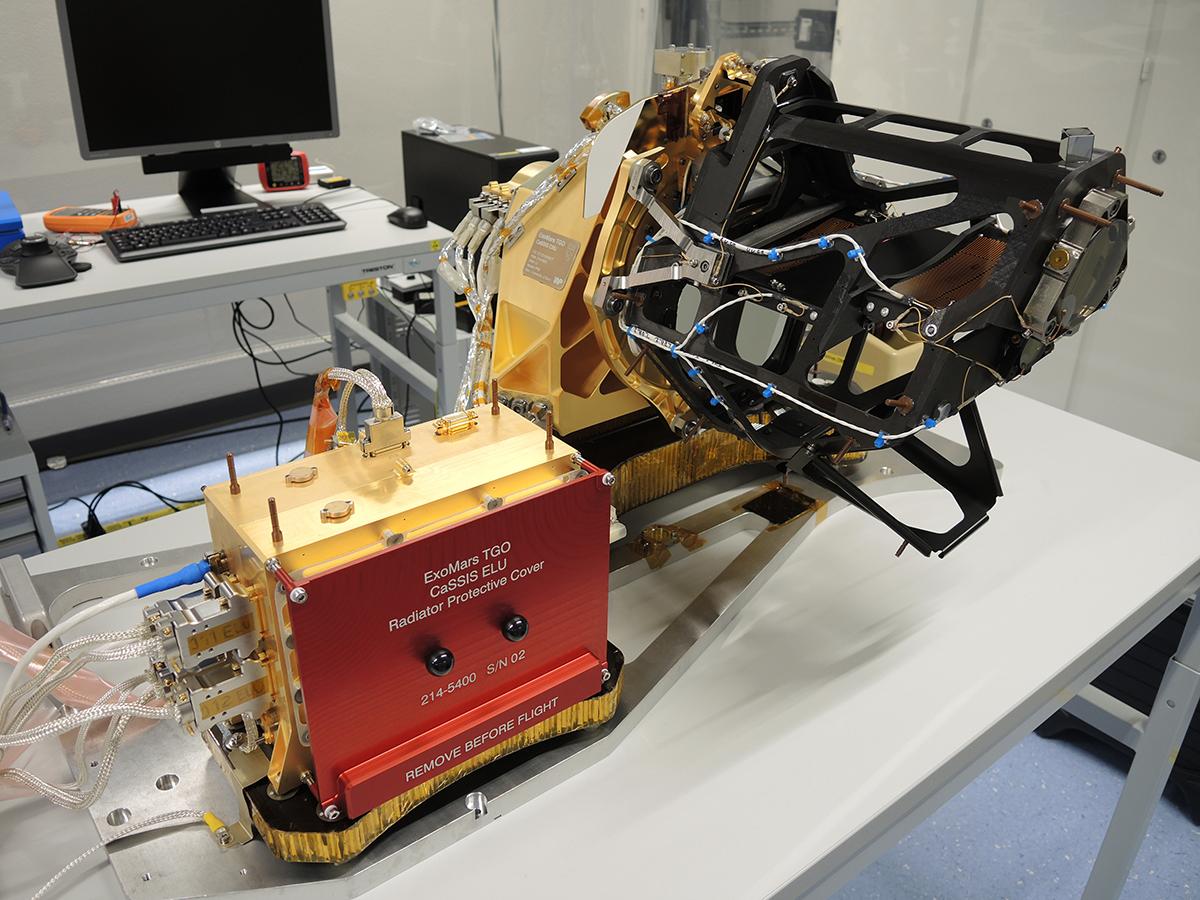
Как я уже сказал, в нашей лаборатории мы ломаем голову над системой автономной навигации дронов на основе использования только бортовых видеокамер. Эти камеры дёшевы и легки, что идеально подходит, особенно для мини-дронов. В настоящее время мы сотрудничаем с Лабораторией реактивного движения НАСА (Jet Propulsion Laboratory) в изучении перспектив применения событийно-управляемых систем (СУС) видеомониторинга в рамках будущих полётов таких дронов на Марсе. Эти системы представляют собой совершенно новый тип технологий с более высокой разрешающей способностью и более низким энергопотреблением.
(СУС реализует различные алгоритмы реакции системы на тревожные события, происходящие на объектах, где установлены видеокамеры. Такого вида видеосистемы отличаются своевременностью вывода событийной видеоинформации на мониторы, широкополосной передачей данных сразу нескольким программам-приложениям и возможностью обработки сложных событий, — прим. ред. рус.)
Как использование дронов может помочь в поисках следов жизни на Марсе и какое значение для этих поисков имеют «лавовые трубки»? Что могут делать дроны из того, чего не умеют марсоходы?
Дрон способен преодолевать большие расстояния за гораздо меньшее время, чем марсоход. В будущем группы дронов будут использоваться для того, чтобы определить, насколько окружающая среда подходит как для выполнения космических миссий людьми, так и для жизни микроорганизмов. Согласно последним исследованиям, жизнь на Марсе могла бы скрываться во льдах внутри «лавовых трубок», которые образовались в результате вулканических процессов.

Показать больше
Поиск жизни в космосе: Швейцария заходит с козырей!
Дроны — идеальное средство для проникновения в «лавовые трубки», и для их изучения в рамках будущих полётов на Марс, а событийно-управляемые камеры могут сыграть тут решающую роль по трём причинам: они позволят находить точки входа в «лавовые трубки» во время пролётов дронов над ними, меньшее энергопотребление сможет увеличить продолжительность полёта дрона, а более высокая разрешающая способность значительно повысит четкость изображений, получаемых «на ходу», при быстром движении, а это означает, что дрону, чтобы что-то там такое рассмотреть на поверхности, не нужно будет больше замедляться.
Кроме того, «лавовые трубки» — это идеальное место для жизни человека на Марсе. Они способны защитить людей от космического излучения, от пылевых бурь, от аномальных колебаний температур и микрометеоритов, а дроны — это идеальный тип робототехники для исследования этих «трубок», потому что некоторые из них могут оказаться слишком глубокими, труднопроходимыми или совсем даже непроходимыми даже для высокоманёвренных марсоходов.
Какова была роль вашей лаборатории в осуществлении полёта дрона Ingenuity?
В 2009 году, когда я ещё был докторантом в Лаборатории автономных систем Швейцарской высшей технической школы Цюриха, мы с моей командой представили наш первый проект по осуществлению автономного полёта БПДА — то есть мы реализовали взлёт, навигацию из пункта А в пункт Б и посадку мини-дрона с камерой и инерционным датчиком без участия GPS.

Это была первая практическая демонстрация возможностей беспилотного летательного аппарата, движущегося автономно с использованием только камеры. Все такого рода системы ранее, да и 99% существующих сейчас беспилотных летательных аппаратов по-прежнему основаны на GPS. Но на Марсе, как вы понимаете, GPS нет. Поэтому работавшие в Ingenuity алгоритмы напрямую опирались на этот наш проект, поскольку он также использует только одну камеру и инерционный датчик ускорения. Более того, первый марсианский полёт Ingenuity в точности повторил тот, что показывали мы в ходе нашего первого эксперимента в 2009 году: взлёт, зависание, посадка.
Каким образом дрон ориентируется в пространстве и какие технические проблемы необходимо было решить для того, чтобы полет состоялся в штатном режиме?
Дистанционно с Земли куда легче управлять марсоходом, чем дроном, даже несмотря на задержку связи продолжительностью в несколько минут, а все потому, что, пока робот «ждёт» следующей команды, его колёса остаются в контакте с грунтом. Дроном сложнее управлять потому, что он очень чувствителен к малейшей турбулентности в атмосфере, из-за чего команды управления необходимо отправлять десятки раз в секунду.
И отправляются они, что понятно, не с Земли, а генерируются непосредственно «автопилотом» дрона, или, точнее, программным обеспечением системы наведения дрона. Работа автопилота дрона состоит из двух этапов: сначала он получает и аккумулирует всю информацию от всех своих бортовых датчиков (блока инерциальных измерителей, высотомера и обращённой вниз камеры) для оценки трёхмерного положения дрона и его позиционирования относительно места старта.
Затем он использует эти данные, чтобы следовать заранее рассчитанным маршрутом. Этот предварительно рассчитанный маршрут — единственная информация, отправляемая с Земли инженерами НАСА. Маршрут состоит, условно говоря, из серии промежуточных пунктов, попав в который дрон должен иметь расчетные положение, ориентацию и скорость. Вот пример такого предварительно рассчитанного маршрута: надо взлететь, набрать высоту в один метр, пролететь прямо и горизонтально три метра с постоянной скоростью 1 метр в секунду и наконец опуститься на поверхность Марса.
Полёт дрона Ingenuity был пока технологической демонстрацией, единственная цель которой — показать, что мы можем заставить дрон как зависать на месте, так и летать по короткой траектории в разреженной марсианской атмосфере. В будущем более технические продвинутые дроны должны будут быть в состоянии выполнять уже сложные команды, такие как «лети и сфотографируй вот тот камень», «войди в эту „лавовую трубку“, создай её трёхмерную карту и вернись на базу». Однако такие технологии пока ещё находятся в процессе разработки, и они ещё недостаточно надёжны даже для использования на Земле.

Показать больше
В каких странах не живёт ни одного швейцарца?

Показать больше
С чего начинается родина по-швейцарски?

Показать больше
Город Базель — швейцарская столица одиночества

Показать больше
Все больше швейцарских евреев задумываются об эмиграции в Израиль

Показать больше
Новый курс Трампа ставит под угрозу глобальный статус Женевы




В соответствии со стандартами JTI
Показать больше: Сертификат по нормам JTI для портала SWI swissinfo.ch




Примите участие в дискуссии