Wie Roboter und Menschen gemeinsam Dinge tragen lernen
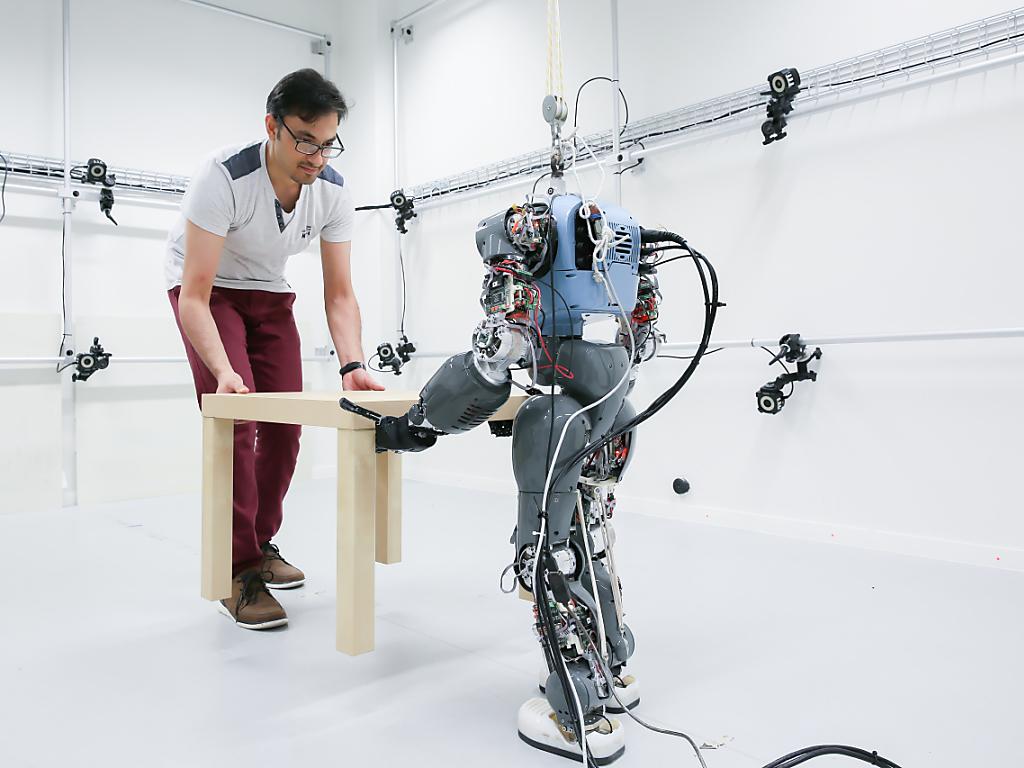
(Keystone-SDA) Ein Forscherteam der ETH Lausanne (EPFL) hat untersucht, wie Menschen ihre Schritte synchronisieren, wenn sie sperrige Gegenstände wie einen Tisch tragen. Ziel ist herauszufinden, wie man Roboter programmieren müsste, um beim Tragen zu helfen.
Wer schon einmal gezügelt ist, kennt die Situation: Einer nimmt den Tisch vorne, einer hinten, und los geht’s. Dabei synchronisieren sich innerhalb kürzester Zeit die Schritte beider Tragenden. Aber ist das ein bewusster Prozess oder ein rein mechanischer?
Forschende um Auke Ijspeert und Jessica Lanini von der ETH Lausanne (EPFL) sind dieser Frage nachgegangen. «Eines unserer Ziele dabei ist, herauszufinden, wie man Roboter programmieren müsste, um mit einem Menschen oder einem anderen Roboter gemeinsam sperrige Objekte zu tragen», erklärte Ijspeert im Gespräch mit der Nachrichtenagentur sda.
Die Forschenden liessen zwei Frauen und vier Männer in unterschiedlichen Personen-Kombinationen ein eineinhalb Meter langes Objekt – ähnlich einer «Krankentrage» – mit einem Gewicht von acht Kilo zwölf Meter hin und her tragen. Dabei untersuchten sie, wie sich die Schritte synchronisierten.
Vom Zwei- zum Vierbeiner
Wie sie im Fachblatt «PLOS One» berichten, wird aus zwei Menschen quasi ein Vierbeiner wie ein Pferd oder eine Giraffe: «Am häufigsten haben wir die Gangarten Trab und Pass beobachtet, also das gleichzeitige Vorschwingen der diagonalen Beinpaare oder der Beine auf der gleichen Seite.» Bei anderen Gangarten wie Schritt, Galopp oder Tölt hörte die Ähnlichkeit zu Pferden allerdings auf.
Welche der beiden Gangarten, Trab oder Pass, die Trägerinnen und Träger im Experiment einnahmen, hing vom zuerst vorgeschwungenen Bein ab, wie Ijspeert erklärte. «Sie synchronisieren sich in der Gangart, die der Anfangssituation am ähnlichsten ist.»
Die Synchronisierung der Schritte konnten die Forschenden anschliessend am Computer simulieren, um die Rolle der mechanischen Kopplung und bewusster Steuerung zu bestimmen. Dabei stellten die Wissenschaftler fest, dass die mechanische Kopplung den Hauptteil ausmacht – bewusste Entscheidungen durch die Tragenden braucht es praktisch nicht.
Mechanische Kopplung reicht
Das helfe herauszufinden, wie man Hilfsroboter künftig programmieren müsse, so Ijspeert. «Braucht ein Roboter Stimmerkennung für Anweisungen? Oder funktioniert die Synchronisation der Schritte ganz simpel durch rein mechanische Kräfte? Unsere Studie deutet darauf hin, dass es einfach durch die mechanische Kopplung funktionieren könnte.»
Ein anschauliches Beispiel für Synchronisation durch mechanische Kopplung seien Metronome, die man auf eine Fläche nebeneinander stelle, so der Forscher. Durch kleine Kräfte, die über die Fläche übertragen werden, synchronisieren sich zunächst asynchrone Metronome.
Die nun vorgestellte Studie ist teil des EU-Projekts «CogIMon» im Rahmen des Förderprogramms «Horizon 2020», das neue Wege bei der Zusammenarbeit von Menschen und Robotern erforscht.

Mehr
Argentinien: Tausende Nachkommen von Ausgewanderten fordern den Schweizer Pass

Mehr
Auswandern auf Zeit: So geht es der Schweizer Familie in Thailand

Mehr
Diese 5 Dinge sollten Sie vor dem Auswandern über Ihr Bankkonto in der Schweiz wissen

Mehr
#detrans: Die bekannteste trans Person der Schweiz will keine Frau mehr sein



